体を大きく切り開くことなく、カテーテルと呼ばれる医療用チューブ、内視鏡などを体内に挿入し検査や治療を行う低侵襲医療が行われていますが、大きさや形状の制限から機能や精度に限界があります。極小の血圧センサ、超音波センサなどを開発、搭載することで低侵襲医療機器の未来へ向けた製造技術の開発と機器の高性能化、多機能化を行っています。将来的には体内で精密な検査治療を行う半自律型マイクロロボットの実現も視野に入れています。
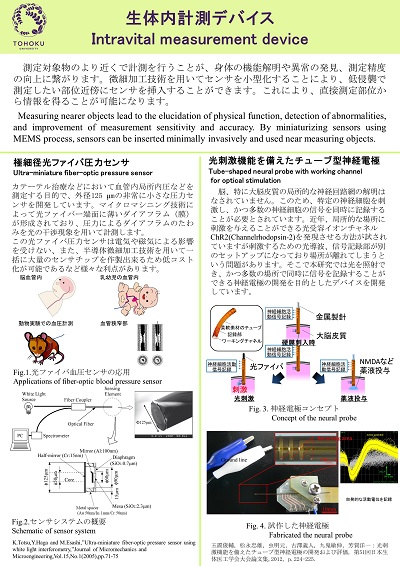
カテーテル治療などにおいて血管内局所内圧などを測定する目的で、外径125μmの非常に小さな圧力センサを開発しています。 MEMS技術によって光ファイバー端面に薄いダイヤフラム(膜)が形成されており、圧力によるダイヤフラムのたわみを光の干渉現象を用いて計測します。この光ファイバ圧力センサは電気や磁気による影響を受けないという利点があります。
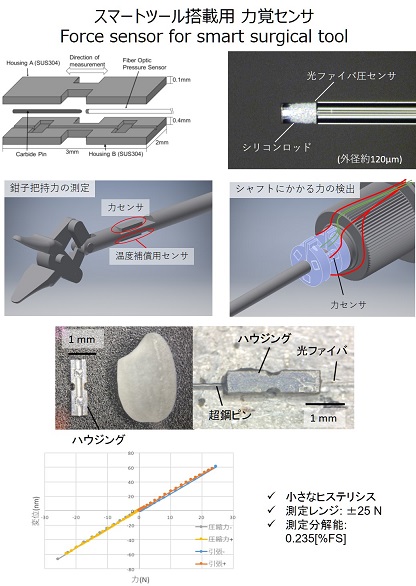
経鼻的下垂体手術は、 鼻腔から手術器具や内視鏡を挿入し下垂体腫瘍を摘出する手術で、 組織に対する微細な操作が求められます。この手技への手術ロボットの導入において力覚センサの搭載が、より安全性を高め、
微細な操作を可能にすると考えられます。開発したセンサは、光ファイバ圧力センサを応用したものであり、電磁ノイズ耐性・生体適合性を有し、かつ微細な形状です。作製したセンサの写真と,力に対する応答評価結果を示します。測定レンジ
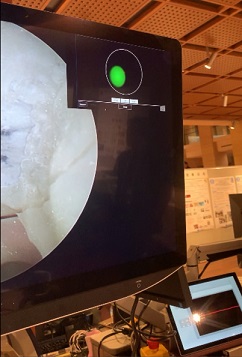
±25 N,測定分解能 0.235[%FS]で、小さいヒステリシス特性を示しています。このセンサは微細で実装が行いやすいため、いわば「光歪みゲージ」として、様々な既存医療器具へ装着し、その手技を定量化するなどの応用も期待されます。この研究成果は東北大学・東京大学・九州大学の共同研究の成果です。シャフトにかかる力の表示(緑の円の位置が力の方向を,円の大きさが力の大きさを示しています)
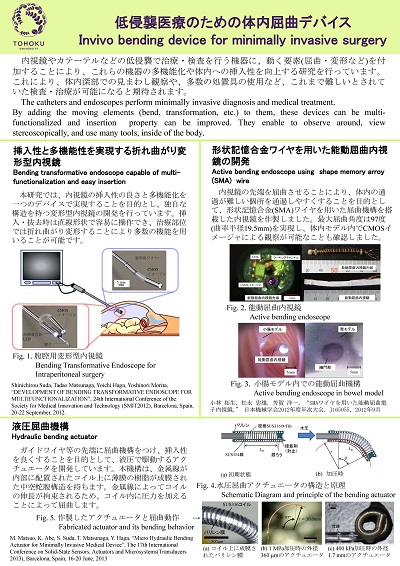
TiNi製の形状記憶合金(SMA; Shape Memory Alloy)運動素子(アクチュエータ)を3本、伸ばした状態でステンレススチールコイルの中に固定したもので、体外からのリード線を介したSMAへの通電の量に応じて形状記憶効果により縮み、様々な方向に屈曲します。体内での精密な位置決め、見回し観察などに役立ちます。右の写真は外径1.6mmです。
独自な折り曲げ構造を持つ変形型内視鏡を設計し,挿入・抜去時は直線形状で容易に挿入・抜去でき,治療部位ではワイヤ牽引により折れ曲がり変形し多数の機能を発揮できる内視鏡の開発を行っています。国際特許を取得済みです。
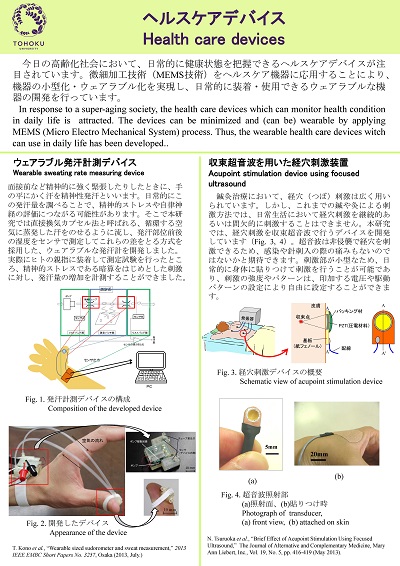
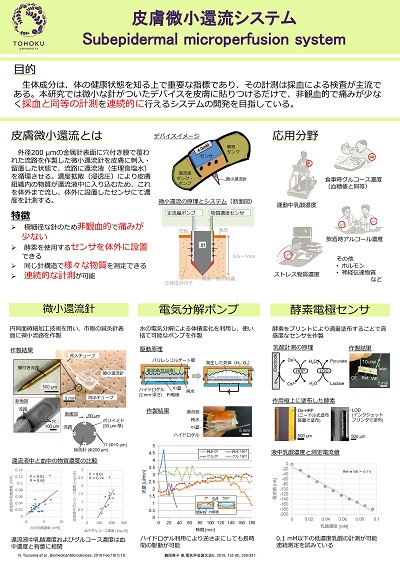
皮膚に貼り付け、皮下の血圧や血行動態を日常生活の中で無侵襲に計測する小型超音波センサや、鍼灸で用いる針付きパッチを利用し本来は採血の必要がある血液中の生体成分を痛みなくモニタリングできる皮下組織液採取システムを開発しています。これらの機器は微細加工技術を用いることではじめて実現でき、インターネットとつながることで健康管理に役立つ高付加価値を生み出します。
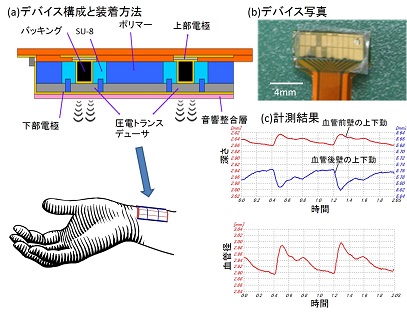
一般に血圧を測る際は、腕や手首などにマンシェットを巻き付けて圧迫するカフ圧迫法が用いられますが、皮膚上に置いた超音波トランスデューサからパルス波を出し皮下の血管の前壁と後壁の反射エコーを測定し、その遅れ時間の違いを計測することで血管径を計算し、血管径の変化から血圧を推定するシステムです。圧迫感がなく継続的に計測ができます。素子を2次元アレイ状に配置し、ちょうど血管の上に位置し血管径の変化がみられる素子からの信号のみを利用することで皮膚上の超音波トランスデューサ素子と皮下の血管の位置合わせを容易にします。実使用の際は装着時にのみ従来のカフ圧迫法による血圧測定を行い、その値から校正を行います。急激な血圧変化を計測し脳卒中の危険を予測することや、ストレスに対する血管径の変化からストレスの原因やストレスを受けやすいタイミングなどを知ることができると期待されます。F
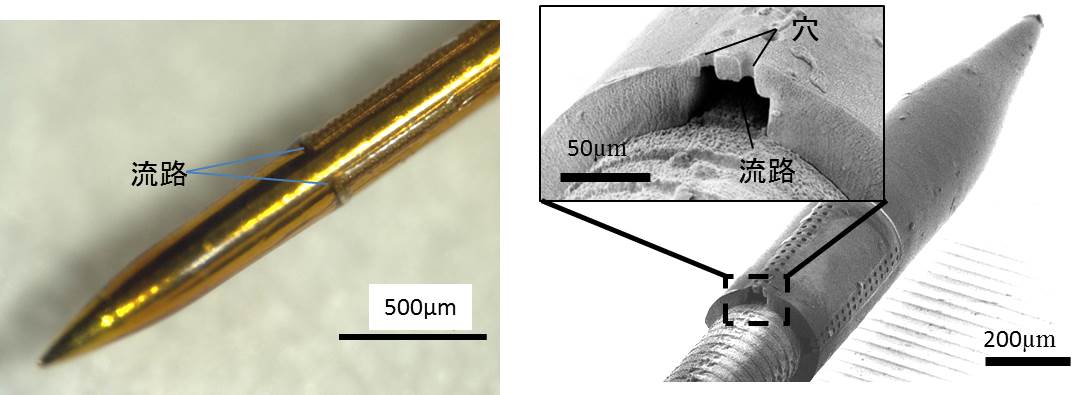
血糖や乳酸などの生体成分を日常的にモニタリングすることで、健康状態の管理が容易になります。表面に流路が形成された細径な金属針を皮膚に浅く刺し、微小還流を行うことにより皮下の生体成分を体外に取り出し計測します。分子量の小さい血糖や乳酸などは血中の濃度と皮下の濃度が良く相関することが知られており、採血の必要がなくなります。非平面微細加工技術を用いて外径0.2
mmの針の上に表面に穴の開いた流路を作製しています。
大量生産が可能な半導体プロセスやMEMSプロセスの多くは平らなウェハ上に加工を行いますが、体内で用いる医療機器や多くのウェアラブル健康管理機器へ組み込むための実装には適しません。直径数mmのチューブの表面、内面に微細加工を行う、新しい加工技術の開発と、それに必要な装置の開発を行っています。量産性のあるプロセスにより製造コストを下げ、広く使って貰えることを目指しています。
医医師の訓練、手術手技の評価、医療機器開発の際の安全性や有効性評価には、ヒトに対する実際の手術、実験動物の利用などが行われますが、これに代わる、マイクロセンサを搭載した新たな臓器モデルの開発を行っています。臓器の形状、物理特性を再現した臓器モデルに様々なのマイクロセンサを搭載することで、手術の治療効果、手術中に組織にかかる力などを定量化します。
上記の目的のために開発してきた微細加工技術、組立技術の新たな応用、可能性について、実際に作ってみることで検討しています。 けん玉に加速度センサやジャイロセンサなどの慣性力センサを搭載することによって、脳卒中後に生じる手足の麻痺などへのリハビリテーション(リハビリ)の手助けを行います。患者が楽しみながらリハビリを継続して行うことができるとともに、患者の身体機能の改善を定量化することができると期待されます。が授業(創造工学研修)として芳賀研で試作したのをきっかけに開発が始まり、2017年11月に北京で行われたiCAN世界大会で3位になりました。
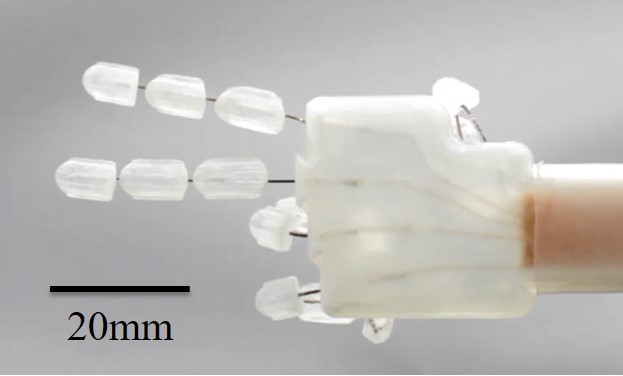
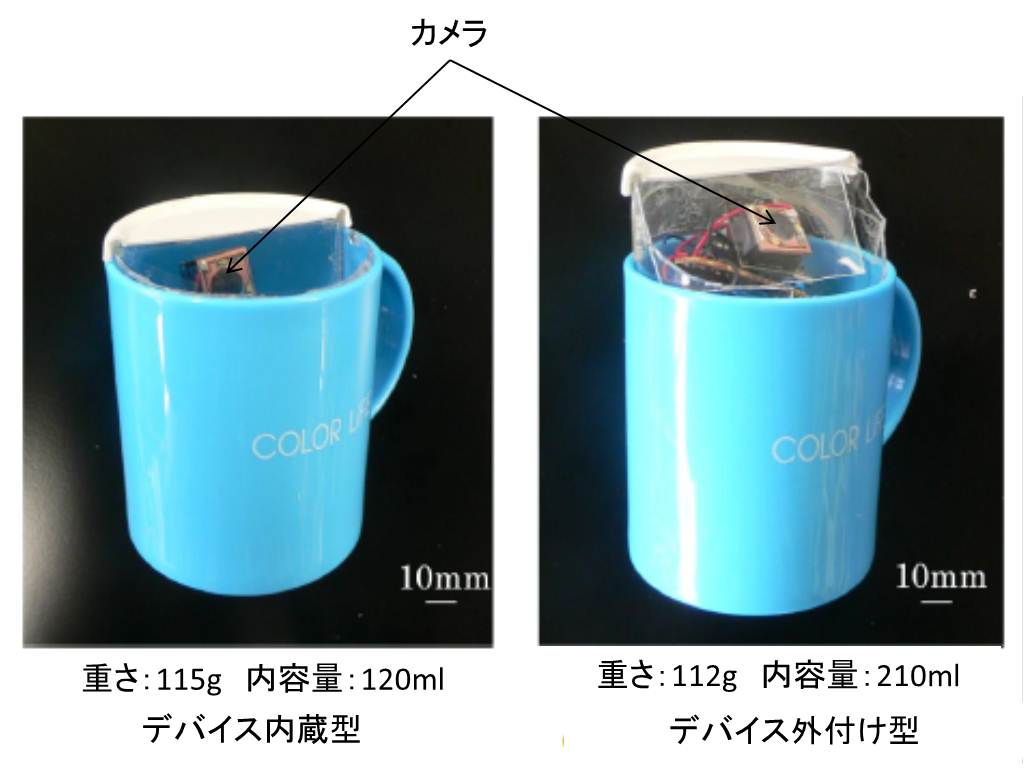
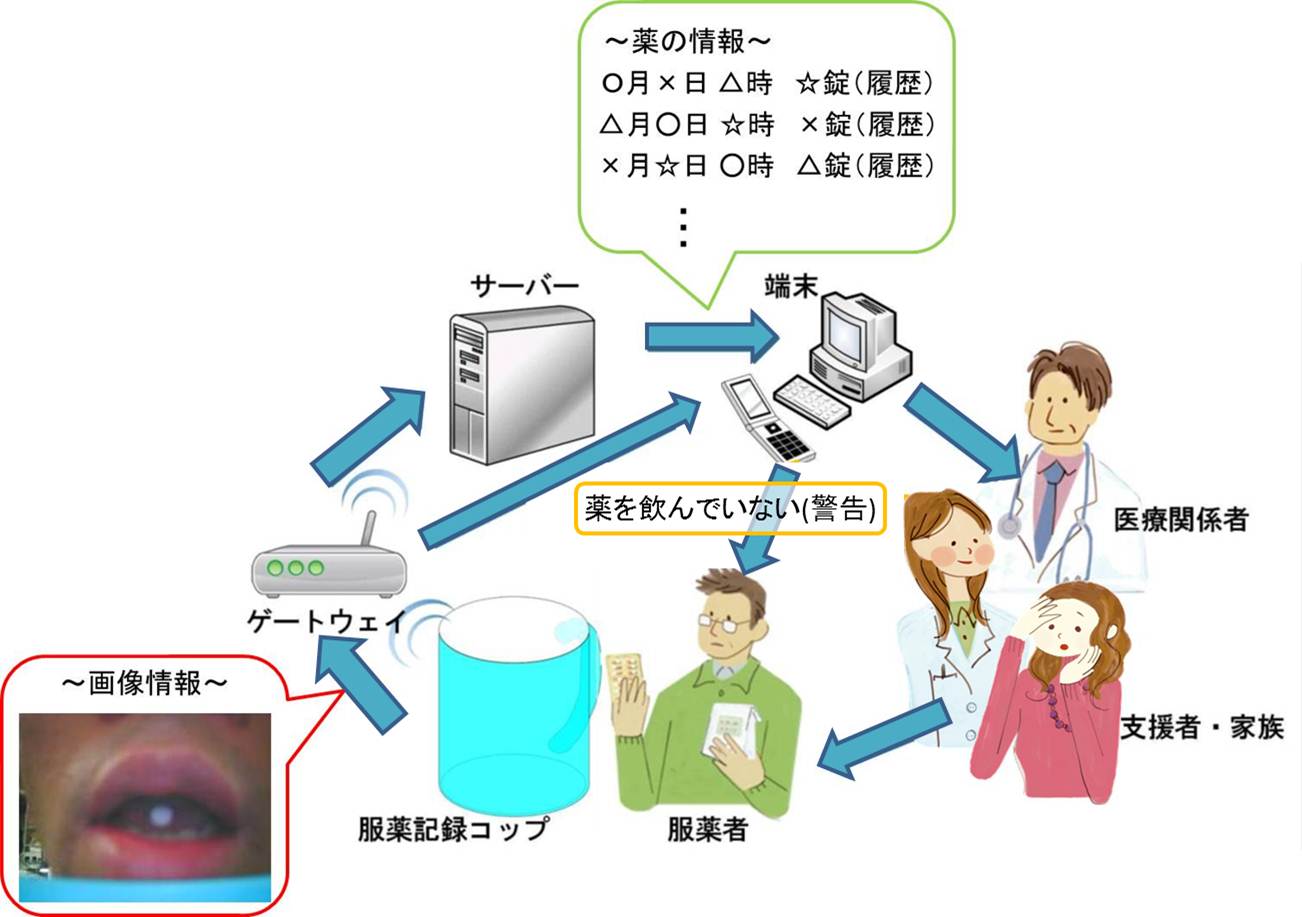
形状記憶合金を用いた屈曲機構について量産性の高い構造と作製方法を開発し、ロボットハンドに応用してみました。 使用者が薬をきちんと飲んだかどうかを記録するコップです。コップには小型カメラが内蔵されていて、このコップを使って水と一緒に服薬するときの舌の上の薬の画像を撮影記録します。撮影された映像はインターネットサーバーにワイヤレス伝送されます。薬の飲み間違いや飲み忘れの防止、新薬験薬の際の正確な服薬記録に役立つと記載されます。
ザクとは違う機体の、あの武器を、形状記憶合金を用いた能動カテーテルの屈曲機構で作ってみました。(クリックすると動画が再生されます)
[1] Micromachined 125um(<--μm) Diameter Ultra Miniature Fiber-Optic
Pressure Sensor for Catheter Trans. IEE of Japan, Vol. 120-E No. 2 (2000),
p58-63T. Katsumata, Y. Haga, K. Minami and M. Esashi出版日:2000年2月(マイクロマシーニングにより作製されたカテーテルのための直径125μm極細径光ファイバ圧力センサ)ISSN
1341-8939 電気学会論文誌E) The Transaction of The IEE of Japan,120-E,2 (2000),58-63マイクロマシニング技術により作製された極小の薄いダイヤフラム構造を光ファイバー端面に取り付けることで、外径125
μ m という極細径圧力センサを開発した。圧力によるダイヤフラムの変位を光の干渉現象による反射光の変化として検出する。レーザー光を光源 として用い、圧力センサとしての動作を確認した。狭い空間に挿入できるので、体内局所の血管内圧や脳脊髄圧などをモニターするのに役立つと期待される。[2]
カテーテル先端の位置・姿勢を検出する磁気センサシステム電気学会論文誌E, 120巻 5号 (2000), p211-218戸津 健太郎、芳賀
洋一、江刺 正喜出版日:2000年5月ISSN 1341-8939(電気学会論文誌E,)Trans .IEE of Japan, Vol.120-E
No.5 (2000), p211-218カテーテル先端に微小かつ高性能な磁気-インピーダンス効果センサを3個搭載し3軸の磁気センサとし、患者近くに置いた外部コイルからの磁界および地磁気を検出してカテーテル先端の位置と向いた方向をモニターする。センサは直径30μmのFeCoSiBアモルファスワイヤにバイアス磁界を発生させるコイルが巻いたもので、磁界の強さによって変化するワイヤ両端間の電圧を取り出す。あらかじめ術前に取り込んでおいた3次元血管像にセンサ出力を重ね合わせることで3次元的な位置と姿勢のモニターを行う。試作したセンサをポリマー微小構造体に取り付け3軸センサとし、ポリマーチューブ製血管モデルに挿入し。測定結果をコンピュータ内の3次元血管モデルに重ね合わせ表示した。(Magnetic
sensor system for detecting position and orientation of a catheter tip)[3]
細径能動カテーテルのための螺旋骨格薄肉チューブ電気学会論文誌E, 120巻 8/9号 (2000), p426-431芳賀洋一、前田重雄、江刺正喜出版日:2000年8月1日(Thin-walled
Tube Supported by Coil Spring for small Diameter Active Catheters)ISSN
1341-8939,Trans. IEE of Japan Vol.120-E No.8/9 (2000), p426-431能動カテーテルの絶縁や防水のためのアウターチューブを、簡単なプロセスで作製する方法を開発した。ライナーコイルである螺旋骨格周囲にパリレン薄膜を形成し細径かつ薄肉のチューブとする。螺旋骨格を持った薄肉チューブ構造のため細径薄肉でありながら座屈やキンクによる閉塞が起こりにくいという特徴があるので、能動カテーテル以外にもドレナージカテーテルやなどの留置カテーテルや人工血管にも有用である。[4]
形状記憶合金コイルを用いた細径能動カテーテル電気学会論文誌E, 120巻 11号 (2000), p509-514芳賀洋一、江刺正喜出版日:2000年11月Small
Diameter Active Catheter Using Shape Memory Alloy CoilsTrans. IEE of Japan,
Vol.120-E No.11 (2000), p509-514Y. Haga and M. Esashi血管内低侵襲治療に役立てるために、形状記憶合金コイルを用い、外部から屈曲動作を電気的にコントロールする能動カテーテルの開発を行った。様々な設計の能動カテーテルを試作し、血管内など液体中で用いるのに最適な設計を見いだした。結論として、アウターチューブを内側から支えるようにライナーコイルを置いてアウターチューブが屈曲を妨げるのを防ぎ、ライナーコイルの内側に一定のすき間を空けて形状記憶合金コイルを配置して外部への放熱を少なくする構造が良いことが分かった。また、上記の設計で水中動作を確認し、このときに生体内でも許容される安全な表面温度であることを確認した。[5]
屈曲、ねじれ、伸長能動カテーテルの電気めっきによる組み立て電気学会論文誌E, 120巻, 11号 (2000), p515-520芳賀洋一、江刺正喜出版日:2000年11月Assembly
of Bending, Torsional and Extending Active Catheter Using ElectroplatingTrans.
IEE of Japan, Vol.120-E, No.11, 2000, p515-520Y. Haga and M. Esashi形状記憶合金コイルを用いて、屈曲、ねじれ回転、伸縮動作外部から自在に動作をコントロールする機構を新たに開発した。また、組み立てに関して形状記憶合金コイルとライナーコイルの接続部を一括で作る技術を開発した。形状記憶合金に施した絶縁被膜をレーザで除去し、そこへ金属の選択的電気めっきおよび樹脂の電着することで接続部を形成する。これにより細径の能動カテーテルを一括にかつ安価に製作することができる。血液に触れる場合、感染防止のため使い捨てにする必要があるので、安価に作製できる意味は大きい。[6]
Batch fabricated flat meandering shape memory alloy actuator for active
catheterSensors and Actuators A, Vol.88 No.2 (2001), p112-120T. Mineta,
T. Mitsui, Y. Watanabe, S. Kobayashi, Y. Haga and M. Esashi出版日:2001年2月(能動カテーテルのための平坦ジグザグ形状記憶合金アクチュエータの一括作製)形状記憶合金マイクロアクチュエータを一括で精度良く作製するために、Ti-Ni形状記憶合金シートにフォトリソグラフィと電解エッチングを行い一括で微細な加工ができるプロセスを開発した。犠牲層金属層を設けることで形状の安定した貫通加工が実現できる。試作したジグザグばね型マイクロアクチュエータを用いて医療用能動屈曲カテーテルを試作しその動作を確認した。また超弾性合金への適用も行った。[7]
Sensors Update vol.8/Edited by H.Baltes, W.Gopel, J.Hesse (WILEY-VCH) (2001),
p148-186 (全227ページ)6. Multifunctional active catheter (多機能能動カテーテル)Y.Haga,
T.Mineta and M.EsashiPublish date: Feb. 2001Published Online: 11 Apr 2001担当部分:Chapter
6. "Multifunctional active catheter"では、カテーテルに搭載し高機能化するため、MEMS技術を応用し作製したマイクロアクチュエータおよびマイクロセンサの構造と作製について述べるとともに、これらを搭載した医療デバイスについて記述している。[8]
Hybrid optical fiber-apertured cantilever near-field probeApplied Physics
Letters, Vol.79, No.19 (2001), p3020-3022P. N. Minh, T. Ono, H. Watanabe,
S. S. Lee, Y. Haga and M. Esashi出版日:2001年11月(光ファイバと孔付きカンチレバーによるハイブリッド近接場プローブ)先端に微小穴を伴ったピラミッド構造を有したカンチレバー作製し、光ファイバ端面に実装することで、今までにない近接場プローブを実現した。カンチレバーはMEMSプロセスを用いてシリコンウェハ上に一括で作製され、反応性イオンエッチングにより微小パーツに分割された後に光ファイバ端面に接合される。試作したプローブを用いて近接イメージングを行った。[9]
Development of Active Catheter, Active Guide Wire and Micro Sensor SystemsInterventional
Neuroradiology Vol.7 (2001), p125-130Y. Haga, T. Mineta, K. Totsu, W. Makishi
and M. Esashi(Suppl 1)出版日:2001年11月能動カテーテル、能動ガイドワイヤーおよびマイクロセンサーシステムの開発について自身の開発例を示すとともに、臨床応用の観点から今後の応用の課題とその展望について述べた。[10]
An active guide wire with shape memory alloy bending actuator fabricated
by room temperature processSensors and Actuators A., Vol. 97-98 (2002),
p632-637T. Mineta, T. Mitsui, Y. Watanabe, S. Kobayashi, Y. Haga and M.
Esashi出版日:2002年?月(室温で作成された形状記憶合金曲がりアクチュエータを用いた能動ガイドワイヤー)Sensors and Actuators
A. Physical Vol. 97-98 (1 April 2002), Page 632-637フォトリソグラフィーと硫酸/メタノール溶液による電解エッチング技術を用いてTiNi板またはチューブからジグザグばね型形状記憶合金アクチュエータを一括に得る技術を開発した。エッチング中に形状記憶効果により変形しないように室温でプロセスを行う。この方法で形状記憶合金板からエッチングにより作成したアクチュエータを用いて、外径0.5mmの能動ガイドワイヤー型屈曲機構を試作した。絶縁と防水のために外側チューブを被せる必要がありポリウレタンを用いて被覆した。水中で約60°屈曲することを確認した。[11]
Batch fabrication of intravascular forward-looking ultrasonic probeSensors
and Actuators A, Vol. 104, No. 1 (2003), pp. 40-43Y. Haga, M. Fujita, K.
Nakamura, C. J. Kim and M. Esashi出版日:2003年3月(血管内前方視超音波内視鏡の一括作製)血管内で前方を画像観察する超音波プローブを一括作製した。このプローブは8個の1-3コンポジット超音波振動子がリング状に並んで構成されており、導電性エポキシによるバッキングで裏打ちされている。このバッキングは音響的なバッキングとして作用するほかに電気的接合部の役割も兼ねる。8個の素子それぞれの特性を確認し、また、水中においてパルスエコーを出し、前方に置いたアクリル板からの反射波を測定した。[12]
非平面フォトファブリケーションによる形状記憶合金パイプからのアクチュエータ作製電気学会論文誌E, 123巻5号 (2003), pp. 158-162峯田貴,
芳賀洋一, 江刺正喜出版日:2003年5月Non-planer Photo-fabrication of an Actuator-Unit from
ashape Memory Alloy PipeIEEJ Trans. SM, Vol. 123, No. 5 (2003), pp. 158-162T.
Mineta, Y. Haga and M. Esashi非平面へのフォトファブリケーションによりTi-Ni形状記憶合金パイプを加工し、複数のジグザグばね型収縮アクチュエータユニットを一括作製する技術を開発した。パイプの円筒面上に3本のアクチュエータが配置されたユニットを一括形成することができるので,個別のアクチュエータをカテーテルに位置合わせしたり接着したりする組立工程を簡素化することができる。[13]
Batch Fabrication of Microlens at the end of Optical Fiber using Self-photolithography
and Etching TechniquesOptical Review, Vol. 10, No. 3 (2003), pp. 150-154P.
N. Minh, T. Ono, Y. Haga, K. Inoue, M. Sasaki, K. Hane and M. Esashi.出版日:不明光ファイバーを通した紫外光を用いたフォトリソグラフィによりファイバー面にマイクロレンズを形成するプロセスを開発した。精密な位置合わせを必要とせず、複数の光ファイバーに一括でプロセスを行うことができる。加熱溶融で凸レンズ形状になったレジストをマスクとしてエッチングを行い光ファイバと同じ素材のマイクロレンズを光ファイバー端面に形成した。[14]
Biomedical Microsystems for Minimally Invasive Diagnosis and TreatmentProceedings
of the IEEE, Vol. 92, No. 1(2004), pp. 98-114(Special issue of the Proceedings
of the IEEE entitled Biomedical Applications for MEMS and Microfluidics)Y.
Haga and M. Esashi出版日:2004年1月MEMSを用いたマイクロデバイスの体内における検査治療応用について事例を広く紹介するとともに自身の研究開発事例を記述した。ナビゲーションシステム、低侵襲治療機器のためのマイクロセンサー及びアクチュエーター、その他の低侵襲検査治療技術、の3つの領域についてまとめ、動作原理とデバイス構成、パッケージング構成、およびそれらに関連する問題に付いても記述した。[15]
Three-axis magneto-impedance effect sensor system for detecting position
and orientation of catheter tipSensors and Actuators A, Volume 111, Issues
2-3 (2004), pp. 304-309K. Totsu, Y. Haga and M. Esashi出版日:2004年3月体内におけるカテーテル先端の3次元的な位置、向いた方向を術者にリアルタイムで提示する磁気センサシステムを開発した。小さくとも感度の高い磁気インピーダンス効果を利用することでカテーテルの機能としての内腔を確保し、かつ外径数mmの細径化を実現できる。試作したデバイスを用いて血管モデルを用い試作したシステムの評価を行った。[16]
形状記憶合金を用いた腸閉塞治療用能動カテーテル 日本コンピュータ外科学会誌, 第6巻第1号 (2004), pp. 23-29水島昌徳,芳賀洋一,戸津健太郎,江刺正喜Active
Catheter Using Shape Memory Alloy for Treatment of Intestinal ObstructionJJSCAS,
Vol. 6, No. 1 (2004), pp. 23-29出版日:2004年6月30日発行腸閉塞(イレウス)の非手術的治療法として小腸まで挿入されるシリコーンゴム製チューブに形状記憶合金コイルマイクロアクチュエータを用いた長さ1方向1関節の能動屈曲機構を搭載し、術者や患者にとって負担が大きい胃の出口である狭い幽門部を容易に通過させるデバイスを開発した。動作を確認するとともに体内使用を想定した環境における評価実験を行った。[17]
Ultra-miniature fiber-optic pressure sensor using white light interferometryJournal
of Micromechanics and Microengineering, Vol. 15, No. 1 (2005), pp. 71-75K.
Totsu, Y. Haga and M. Esashi出版日:2005年1月直径125μmの極細径光ファイバ圧力センサとそのシステムを開発した。MEMSプロセスにより作製された0.7μm厚の薄いSiO2ダイヤフラム構造が直径125μmの光ファイバ端面に形成されており、圧力によるダイヤフラムのたわみを白色光の干渉スペクトルの変化で検出する。光強度の影響を受けない検出原理により、光ファイバの振動やたわみの影響を受けない実用的な使用が可能となる。[18]
Dynamic Braille Display Using SMA Coil Actuator and Magnetic LatchSensors
and Actuators A, Vol. 119, No. 2 (2005), pp. 316-322Y. Haga, W. Makishi,
K. Iwami, K. Totsu, K. Nakamura and M. Esashi出版日:2005年4月視覚障害者へ点字情報を効率よく伝えるために、点字を構成するピンを形状記憶合金コイルアクチュエータを用いて上下させるデバイスを開発した。ピンの位置は磁気ラッチ機構により保持される。これによりピンを集積化させることができる。多数のピンを電気的に切り換えて個別に制御する集積回路を搭載した8本のピンを搭載したモジュールを開発し動作を確認した。[19]
Design and Characteristics of Large Displacement Optical Fiber SwitchIEEE
Journal of Quantum Electronics Vol. 41, No. 2 (2005), pp. 242-249M. M.
I. Bhuiyan, Y. Haga and M. Esashi出版日:2005年2月プラスチック製光ファイバを用いた室内LANのための1×2光ファイバスイッチを開発した。プラスチック光ファイバはコア径が大きく、求められる光ファイバの変位が大きいため、形状記憶合金アクチュエータを用いた。光ファイバの位置は磁気ラッチにより保持される。作製したデバイスを用いてスイッチング動作を行い有効性を評価した。[20]
Medical and Welfare Applications of Shape Memory Alloy Microcoil ActuatorsSmart
Materials and Structures, Vol. 14, No. 5 (2005), pp. S266-S272Y. Haga,
M. Mizushima, T. Matsunaga and M. EsashiPublish date: October 2005形状記憶合金マイクコイルアクチュエータを用いた医療及び福祉応用デバイスの開発について実例を交えて述べるとともに、アクチュエータとしての利点と欠点について記述した。また、フェムト秒レーザーを用いた形状記憶効果を損なわない微細加工の実験結果について述べ、今後の可能性について述べた。さらに磁気ラッチを用いることによる利点について記述した。[21]
Project Artificial MyocardiumJournal of Advanced Science, Vol. 17, No.
1-2 (2005), pp. 118-125T. Yambe, Y. Shiraishi, T. Yamaguchi, M. Shibata,
S. Nitta, M. Yoshizawa, A. Tanaka, K. Abe, F. Sato, H. Matsuki, Y. Haga,
M. Esashi, S. Maruyama,T. Takagi, M. Higa and Y. Luo出版日:不明心不全をきたした心筋を補助するために、空気圧駆動人工心筋および電磁駆動型人工心筋の開発し、動物実験により評価を行った。心筋側面に貼り付ける構成なので弁構造がなく血栓形成の心配がないという利点がある。エネルギーはコイルを用いた経皮エネルギー伝送を用いて実現される。マイクロ化の課題と今後の市場性の見通しについても検討した。[22]
低侵襲医療のための光MEMSレーザー研究, 第33巻11号 (2005), pp. 754-760芳賀洋一, 赤堀寛昌, 戸津健太郎, 和田
仁, 江刺正喜出版日:2005年11月低侵襲医療のために開発された様々な光MEMSデバイスについて、自身のグループの成果を交えて紹介した。体内で精密なレーザー治療を実現するための、圧電駆動2次元マイクロレーザースキャナー、光ファイバー先端にMEMS技術を利用して作製された微小構造体を実装した極細径光ファイバー圧力センサー、その他MEMSマイクロスキャナーを利用した高精細工学イメージングデバイスなどについて記述した。[23]
血管内低侵襲治療のための前方視超音波イメージャーの開発生体医工学, Vol. 43, No. 4 (2005), pp. 553-559陳 俊傑,
江刺正喜, 大城 理, 千原國宏, 芳賀洋一出版日:2005年12月10日カテーテル先端に取り付ける前方視超音波イメージャーを開発した。血管内狭窄部に直接触れることなく3次元形状をイメージングすることが可能であり、これにより血管内治療が安全かつ確実にできる。凸形状の1-3コンポジット振動子を8個搭載した外径3mmのプローブを試作し、発信振動子を1つずつ切り替えてデータを取り込んだ後、コンピュータ上で遅延処理、画像構成処理を行い、基本的な撮像実験を行った。[24]
Minimally Invasive Diagnostics and Treatment Using Micro/nano MachiningMinimally
Invasive Therapy & Allied Technologies, Vol. 15, No. 4 (2006), pp.
218-225Y. Haga, T. Matsunaga, W. Makishi, K. Totsu, T. Mineta, M. Esashi出版日:2006年9月(マイクロ・ナノマシニングを用いた低侵襲検査および治療)MEMS技術をはじめとする微細加工技術を用いることで小さくとも高機能な低侵襲医療デバイスを実現する研究開発について、自身の様々な開発事例を用いて示した。さらにこれらを実現するための新しい微細加工技術について述べ、これらを実現することで現状では難しい高精度でより安全な検査治療および今までにない検査治療が可能となる見通しについて記述した。[25]
小型収束超音波トランスデューサを用いた内視鏡的治療デバイス電気学会論文誌E, 127巻 2号 (2007), pp. 69-74安居晃啓, 芳賀洋一,
陳 俊傑, 伊関 洋, 江刺正喜, 和田 仁(2007年2月1日発行)小型の超音波トランスデューサを内視鏡やカテーテルなどに搭載,あるいは内視鏡の鉗子口を使って体内に持ち込むことで,体内から精密な超音波治療を行うための集束超音波プローブを開発した。これにより超音波と薬剤の相乗効果によって癌などを治療する音響力学療法(SDT)や,超音波とマイクロバブルの併用による遺伝子導入(Sonoporation)を行う。試作したプローブを用いて培養細胞への遺伝子導入を行った。[26]
形状記憶合金を用いた能動屈曲電子内視鏡電気学会論文誌E, 127巻 2号 (2007), pp. 75-81牧志 渉, 松永忠雄, 江刺正喜,
芳賀洋一出版日:2007年2月1日内視鏡の屈曲機構にワイヤ牽引に代えてSMAコイルアクチュエータを用いた、シャフトが細くやわらかい外径5.5mmの電子内視鏡を開発した。屈曲動作を行いながら、先端に搭載した高輝度LEDとCCDカメラにより、明るく鮮明な観察が可能であった。腸などのようにやわらかく複雑に入り組んだ部位に挿入し、先端を自由に屈曲させて観察を行うことができる。[27]
円筒面レーザプロセスを用いた低侵襲医療機器の開発電気学会論文誌E, 128巻 10号 (2008), pp.402-409芳賀洋一, 六鎗雄太,
五島彰二, 松永忠雄, 江刺正喜[28] カテーテル実装に適した血管内MRIプローブの開発電気学会論文誌E, 128巻 10号 (2008),
pp.389-395五島彰二, 松永忠雄, 松岡雄一郎, 黒田 輝, 江刺正喜, 芳賀洋一独自に開発した非平面(円筒)へのMEMSプロセスを利用し、血管内や消化管内などの体腔内に挿入し高精細なMRI(核磁気共鳴撮像法)を行うためのカテーテル実装に適した小型MRIプローブの開発を開発した。[29]
Small Diameter High Resolution Endoscope Using Electromagnetically Vibration
of Single FiberIEEJ Trans. SM, Vol. 129, No. 11 (2009), pp. 399-404T. Matsunaga,
R. Hino, W. Makishi, M. Esashi and Y. Haga[30] 使い捨て化と細径化を目指した形状記憶合金を用いた能動屈曲電子内視鏡の開発電気学会論文誌E
, 131巻 3号 (2011), pp. 102-110牧志 渉, 池田雅春, 江刺正喜, 松永忠雄, 芳賀洋一[31] 多機能化を目指した折れ曲がり変形型内視鏡の開発須田信一郎,
松永忠雄, 芳賀洋一日本コンピュータ外科学会誌, 14巻 4号 (2012), pp. 447-454[32] Brief Effect of
Acupoint Stimulation Using Focused UltrasoundN.Tsuruoka, M. Watanabe, S.
Takayama, T. Seki, T. Matsunaga, Y. HagaThe Journal of Alternative and
Complementary Medicine, Vol. 19, No. 5 (2013), pp. 416-419[33] Tactile
display using shape memory alloy micro-coil actuator and magnetic latch
mechanismT. Matsunaga, K. Totsu, M. Esashi, Y. HagaDisplays, Vol. 34, No.
2 (2013), pp. 89-94[34] 陽極接合可能なセラミック貫通配線基板を用いた静電駆動型超音波トランスデューサ広島美咲, 松永忠雄,
峯田 貴, 芳賀洋一電気学会論文誌E, 134巻 10号 (2014), pp.333-337[35] 口内撮影を用いたコップ型服薬記録デバイス石井賢治,
川合洋子, 鶴岡典子, 布施貴大, 小原 拓, 松永忠雄, 今井 潤, 芳賀洋一電気学会論文誌C, 135巻 2号 (2015), pp. 197-203[36]
光ファイバ圧力センサを搭載した細径臓器灌流カテーテル橘 侑子, 松永忠雄, 早津幸弘, 齋木佳克, 芳賀洋一電気学会論文誌E, 135巻 6号
(2015), pp. 204-209[37] 多点光刺激機能を備えた神経電極の開発玉置俊輔, 松永忠雄, 九鬼敏伸, 虫明元, 古澤義人,
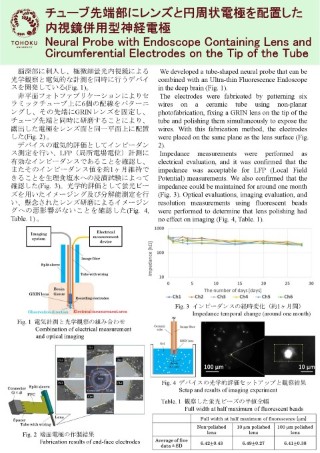
芳賀洋一電気学会論文誌E, 135巻 7号 (2015), pp. 246-252(「脳を読み取るセンサ技術−脳機能計測の最前線−」特集)[38]
皮下微小還流のための使い捨て化を目指した低流量電気分解ポンプの開発鶴岡典子, 松永忠雄, 永富良一, 芳賀洋一電気学会論文誌E, 135巻 8号
(2015), pp. 330-337[39] Development of hood with hydraulically variable
tip diameter for endoscopic submucosal dissectionM. Matsuo, K. Iijima,
T. Matsunaga, Y. HagaSensors and Actuators A, Vol. 232 (2015), pp. 267-275[40]
Flexible Tube-shaped Neural Probe for Recording and Optical Stimulation
of Neurons at Arbitrary DepthS. Tamaki, T. Kuki, T. Matsunaga, H. Mushiake,
Y. Furusawa, Y. Haga Sensors and Materials, Vol. 27, No. 7 (2015), pp.
507-523[41] 内視鏡手術のための液圧駆動屈曲機構の開発須田信一郎、小林拓生、松尾美幸、平良木貴久、高橋恵太、松永忠雄、芳賀洋一日本コンピュータ外科学会誌,
17巻 2号 (2015), pp. 83-90[42] 形状記憶合金ワイヤーを用いた低侵襲医療用一方向能動屈曲機構と ワイヤーの電気抵抗変化を用いたフィードバック制御小林拓生,
松永忠雄, 芳賀洋一電気学会論文誌E, 135巻 10号 (2015), pp. 393-398[43] Capacitive Micromachined
Ultrasonic Transducer Arrays Incorporating Anodically Bondable Low Temperature
Co-fired Ceramic for Small Diameter Ultrasonic EndoscopeF. Yildiz, T. Matsunaga
and Y. HagaMicro & Nano Letters, Vol. 11, No. 10 (2016), pp. 627 -
631[44] Capacitive Micromachined Ultrasonic Transducer Packaging for Forward
Looking Ultrasonic Endoscope using Low Temperature Co-fired Ceramic Side
ViaF. Yildiz, T. Matsunaga and Y. HagaIEEJ Transactions on Sensors and
Micromachines, Vol. 136, No. 12 (2016), pp. 515-521 [45] Lactate and glucose
measurement in subepidermal tissue using minimally invasive microperfusion
needleN. Tsuruoka, K. Ishii, T. Matsunaga, R. Nagatomi, Y. HagaBiomedical
Microdevices, Vol. 18, (2016) , 19 (上記19はarticle number)[46] 小型発汗計の開発とストレス負荷及び温熱負荷時の発汗計測鶴岡典子,
河野隆宏, 松永忠雄, 永富良一, 芳賀洋一生体医工学, Vol.54, No.5 (2016), pp. 207-217光ファイバを用いた微細モジュール式力覚センサによる把持力測定を可能とするロボット鉗子の開発中塚俊樹,
松永忠雄, 芳賀洋一, 北畠新太郎, 高山隆志, 原田香奈子, 光石衛, 荒田純平日本コンピュータ外科学会誌, Vol. 20, No. 4,
pp. 295‐296

 (クリックすると動画が再生されます)
(クリックすると動画が再生されます)